

绝大多数实际控制问题必须处理由于设备限制、安全考虑或者环境法规带来的饱和约束问题。为了达到利益最大化或者满足严格的产品规格,实际生产过程中往往维持执行器运转接近极限;但是,在正常运转过程中执行器的饱和会导致控制系统的性能严重退化(有时甚至会不稳定),并造成经济损失。本文关注了针对执行器饱和问题的抗饱和控制策略的发展,并给出了一种便于在实际工业过程控制中实现的鲁棒抗饱和设计方案。
模型跟踪控制结构(MFC)具有很强的鲁棒性,尤其对实际对象的参数变化。利用MFC结构这一优点,本文结合“补偿设计法”,提出了一种基于MFC的鲁棒抗饱和设计,该设计方法与目前许多抗饱和补偿技术大不相同,因为这些抗饱和设计的中心目标仅仅是为了尽快的恢复到线性行为。然后利用积分二次型约束框架(IQC)以及其相关稳定性分析理论来分析基于MFC的抗饱和设计结构的稳定性和鲁棒稳定性,分别推导给出了其保持稳定性和鲁棒稳定性的充分条件,充分条件的给出为本文的抗饱和设计方案提供了一个在频域上的直观的调节法则。
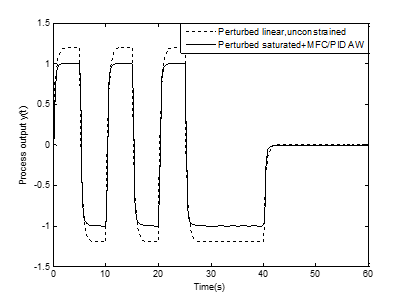
为了验证所提出的抗饱和结构的抗饱和性能和鲁棒性,基于Matlab进行了数值仿真,与已有的几种抗饱和方法如IMC抗饱和方法、低阶抗饱和补偿法、动态抗饱和补偿法等进行仿真对比。仿真结果表明,针对执行器饱和系统,所提出的抗饱和结构不论性能还是鲁棒性都有显著的提升。
文、图 理工学院通讯社 陈新宝
CONTENT END


